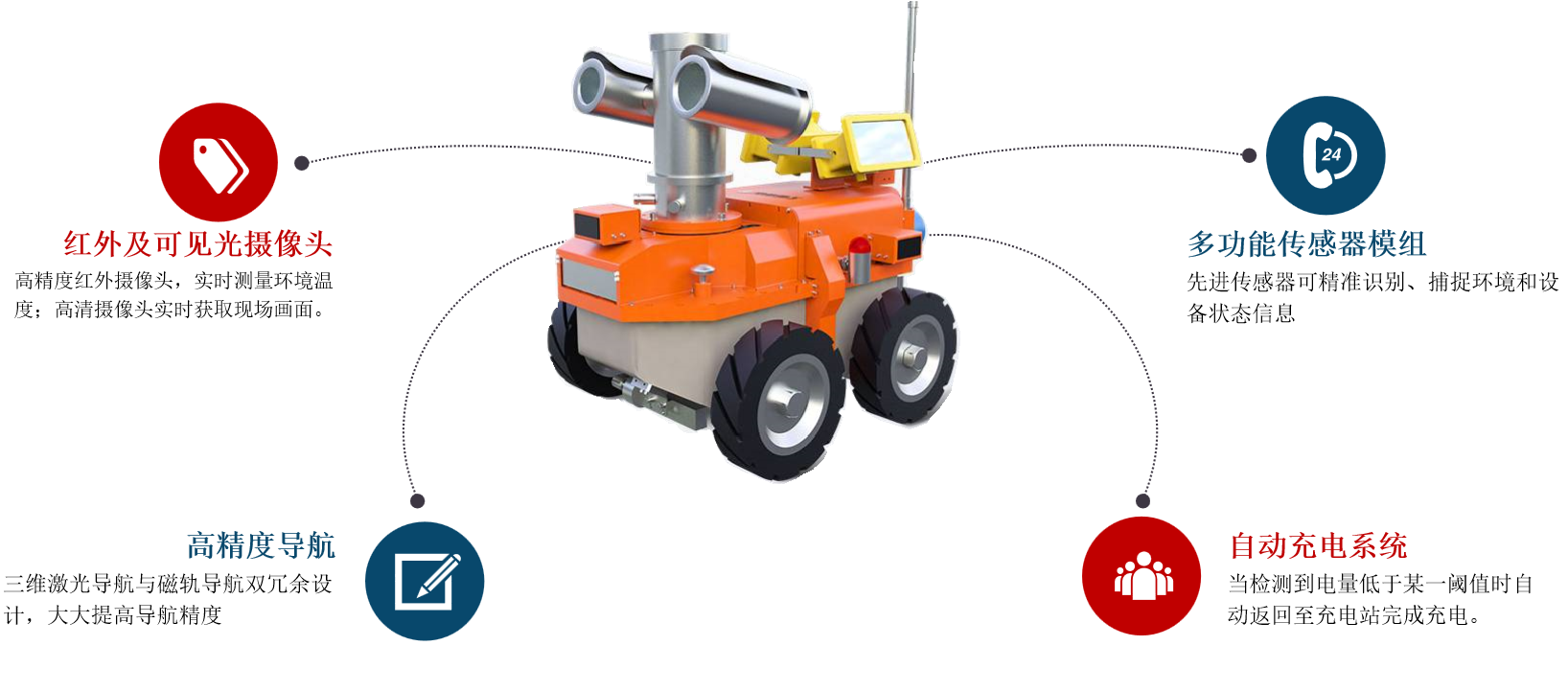
产品介绍
全身防爆设计,可进行全场景巡逻,具备气体激光遥测、可见光以及红外热成像、气体探测传感器挂载等功能。自动驾驶结合先进的组合式导航包括视觉辅助、激光导航等。可在室内外各种恶劣环境下对仪表、液位计、阀门等现场设备的跑冒滴漏及其他异常状态进行分析报警。另外在电量不足时,可自动返回、自主充电。特别在易燃易爆危险品生产、仓储环节中可游刃有余替代人工进行巡检,不仅节省了人力成本,还保障了人员及设备安全。
机器人介绍

|
项目 |
基本技术指标 |
|
整体尺寸 |
总体尺寸900mm(长)*580mm(宽)*950mm(高) |
|
驱动方式 |
全时四驱 |
|
转向方式 |
全向转动 |
|
整机重量 |
不超过300kg(含电池) |
|
运行时间 |
不小于5H(环境温度25℃时) |
|
运动性能 |
最大水平运行速度: 不小于1m/s |
|
定位精度: 不大于10mm |
|
|
刹车性能:1m/s速度下刹车距离不大于0.5m |
|
|
最大涉水高度: 10cm |
|
|
爬坡角度 |
最大爬坡能力不低于15° |
|
越障高度 |
最大越障能力不低于50mm |
|
转弯半径 |
最小转弯半径不大于自身长度 |
|
工作环境 |
工作环境相对湿度:10%~90%(无冷凝水) |
|
工作环境温度: ?20℃~+55℃ |
|
|
存储环境 |
存储环境相对湿度:5%~95%(无冷凝水) |
|
存储环境温度: ?20℃~+60℃ |
|
|
防护等级 |
IP65 |
|
报警 |
RGB三色灯灯光报警,智能语音告警 |
|
传输 |
通信方式:2.4G WIFI / 5.8G WIFI (以实际需求定义) |
|
传输带宽:150Mbps |
|
|
导航 |
激光导航:激光SLAM |
|
航姿传感器:三轴陀螺仪、三轴加速度计 |
|
|
充电方式 |
自动充电 |
|
云台参数 |
旋转速度: 水平0.01°~30°/S;俯仰0.01°~15°/S |
|
俯仰角度: +90°~-90° |
|
|
水平角度: 水平0~360°连续旋转 |
|
|
可见光参数 |
分辨率: 1920X1080 |
|
光学变倍:30倍 |
|
|
红外参数 |
红外检测设备成像分辨率384×288; |
|
防爆标志 |
ExdmbIIBT4 Gb |
产品功能
互联网功能:网络通讯功能强,可接入互联网,将数据传输到指挥中心, 进行数据分析。
远程升级与诊断功能:通过互联网功能实现对机器人的远程升级及故障分析。
热源检测功能:通过红外热成像实现对热源的检测。
自主避障功能:避障系统自动识别障碍物距离,灵敏度高,检测距离远。
自动充电:巡检机器人具有自动充电功能,机器人本体检测到电量低,自动寻找充电桩,进行充电。
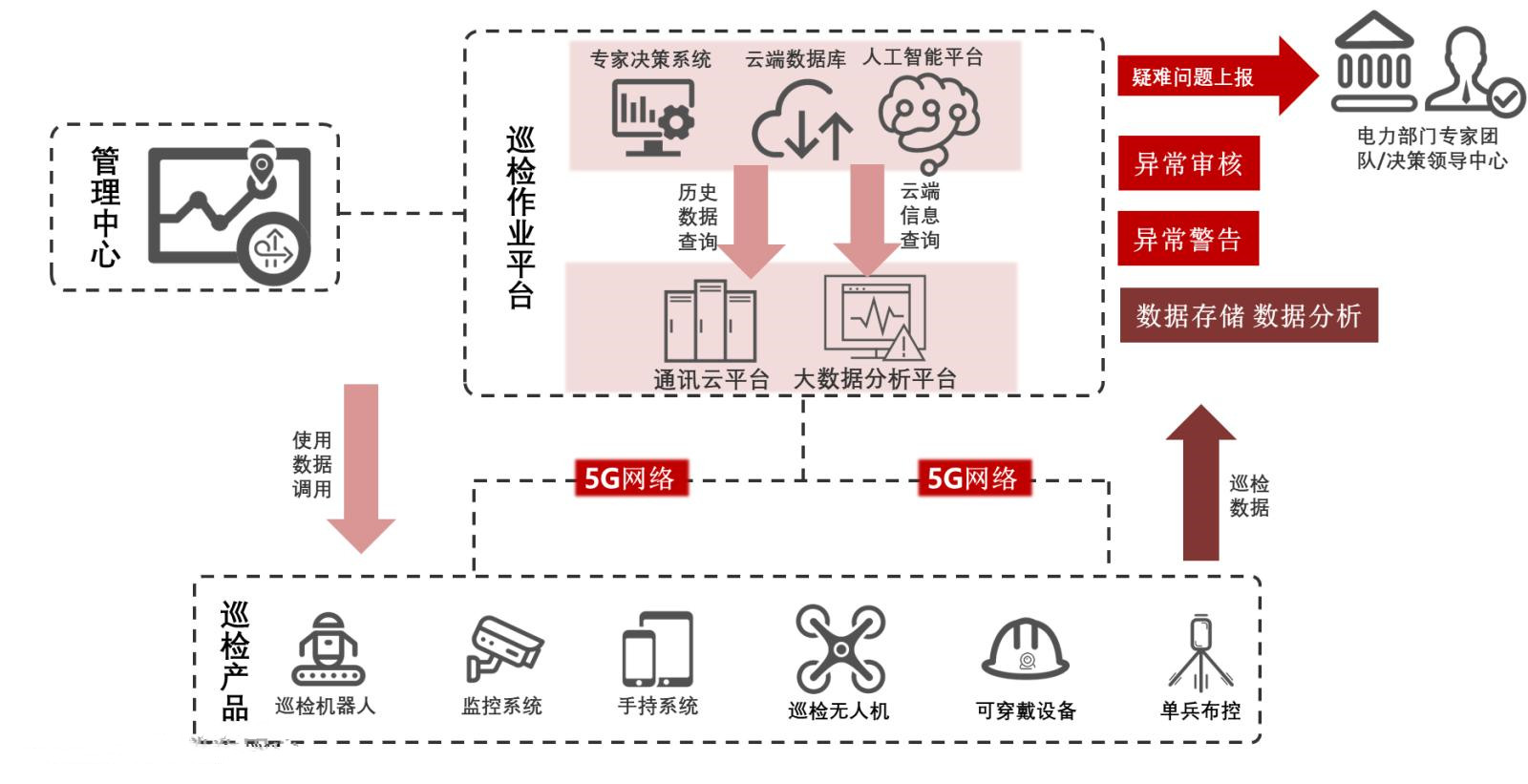
系统架构
智能充电站
防爆巡检机器人具有双向自动充电功能。
充电方式采用电池与充电系统非接触式充电结合的供电方式。非接触式充电系统安装于充电站内,充电站可以起到避雨、防风的作用,主要用于非运行状态的停靠和充电。



智能监测模块
防爆巡检机器人集成多种高精度传感器,通过采集现场巡检数据并进行数据融合和本地分析,当数据超出正常范围时,立即将当前异常状态或者异常数据进行上报,通过系统平台的进一步确认和分析,进而精确定位故障点并找出故障原因,系统根据故障位置和原因作出是否派工维修的决策。目前可实现以下功能:
- 仪器仪表读数及运行状态识别,设备温度测量及异常报警,设备老化报警等;
- 通过对监测数据及图像进行融合分析,可在第一时间发现异常状况,进而上报故障及隐患位置、触发时间、异常类型等信息。

智能控制单元
防爆巡检机器人可以按照设定的路线和时间自主按成巡检任务,具备防碰撞避障功能、一键返航和自主充电功能;
基于激光雷达的SLAM为巡检机器人提供精确定位,通过设置巡检点位置信息,机器人管理程序自动生成最有巡检路线,高清晰度相机实时获取设备运行画面,热成像设备实时获取设备温度,云台可水平360°无死角旋转,全方位获取设备的各种数据,然后通过对数据进行比对分析,发现故障或者隐患并告警。

应用场景